最近OpenAI的Sora模型又大火了一把,据说背后的技术是transformer+diffusion.之前我也大致介绍过stable diffusion的过程,这里我再稍微详细介绍一下经典的扩散模型以及改进之后的DDIM.其中我也有很多不太明白的,只有结合代码理解了.
相关论文[2006.11239] Denoising Diffusion Probabilistic Models (arxiv.org)与[2010.02502] Denoising Diffusion Implicit Models (arxiv.org),2112.10752.pdf (arxiv.org)
Stable Diffusion is a latent text-to-image diffusion model.
已经提出了几种基于扩散的生成模型,其下有类似的想法,包括扩散概率模型、噪声条件评分网络和去噪扩散概率模型。现在常说的基于扩散的生成模型通常指的后者DDPM或者改进的DDIM.
前向扩散过程
所谓的扩散就是给图片(或者是特征,比如stable diffusion就是在所谓latent空间上进行扩散的)加噪声,所加的噪声按照一定分布.
前向过程为一个马尔科夫链,使用重参数化(在VAE中也有),可以表示为
其中α=1-β.$\bar{\alpha}{t}=\prod{i=1}^{t}\alpha_{i}$,β是从0到1中间的采样值,比如0.01,0.02..1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41import torch.nn.functional as F
def linear_beta_schedule(timesteps, start=0.0001, end=0.02):
return torch.linspace(start, end, timesteps)
def get_index_from_list(vals, t, x_shape):
"""
Returns a specific index t of a passed list of values vals
while considering the batch dimension.
"""
batch_size = t.shape[0]
out = vals.gather(-1, t.cpu())
return out.reshape(batch_size, *((1,) * (len(x_shape) - 1))).to(t.device)
def forward_diffusion_sample(x_0, t, device="cpu"):
"""
Takes an image and a timestep as input and
returns the noisy version of it
"""
noise = torch.randn_like(x_0)
sqrt_alphas_cumprod_t = get_index_from_list(sqrt_alphas_cumprod, t, x_0.shape)
sqrt_one_minus_alphas_cumprod_t = get_index_from_list(
sqrt_one_minus_alphas_cumprod, t, x_0.shape
)
# mean + variance
return sqrt_alphas_cumprod_t.to(device) * x_0.to(device) \
+ sqrt_one_minus_alphas_cumprod_t.to(device) * noise.to(device), noise.to(device)
# Define beta schedule
T = 300
betas = linear_beta_schedule(timesteps=T)
# Pre-calculate different terms for closed form
alphas = 1. - betas
alphas_cumprod = torch.cumprod(alphas, axis=0)
alphas_cumprod_prev = F.pad(alphas_cumprod[:-1], (1, 0), value=1.0)
sqrt_recip_alphas = torch.sqrt(1.0 / alphas)
sqrt_alphas_cumprod = torch.sqrt(alphas_cumprod)
sqrt_one_minus_alphas_cumprod = torch.sqrt(1. - alphas_cumprod)
posterior_variance = betas * (1. - alphas_cumprod_prev) / (1. - alphas_cumprod)
加噪声的schedule有多种1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27def cosine_beta_schedule(timesteps, s=0.008):
"""
cosine schedule as proposed in https://arxiv.org/abs/2102.09672
"""
steps = timesteps + 1
x = torch.linspace(0, timesteps, steps)
alphas_cumprod = torch.cos(((x / timesteps) + s) / (1 + s) * torch.pi * 0.5) ** 2
alphas_cumprod = alphas_cumprod / alphas_cumprod[0]
betas = 1 - (alphas_cumprod[1:] / alphas_cumprod[:-1])
return torch.clip(betas, 0.0001, 0.9999)
def linear_beta_schedule(timesteps):
beta_start = 0.0001
beta_end = 0.02
return torch.linspace(beta_start, beta_end, timesteps)
def quadratic_beta_schedule(timesteps):
beta_start = 0.0001
beta_end = 0.02
return torch.linspace(beta_start**0.5, beta_end**0.5, timesteps) ** 2
def sigmoid_beta_schedule(timesteps):
beta_start = 0.0001
beta_end = 0.02
betas = torch.linspace(-6, 6, timesteps)
return torch.sigmoid(betas) * (beta_end - beta_start) + beta_start
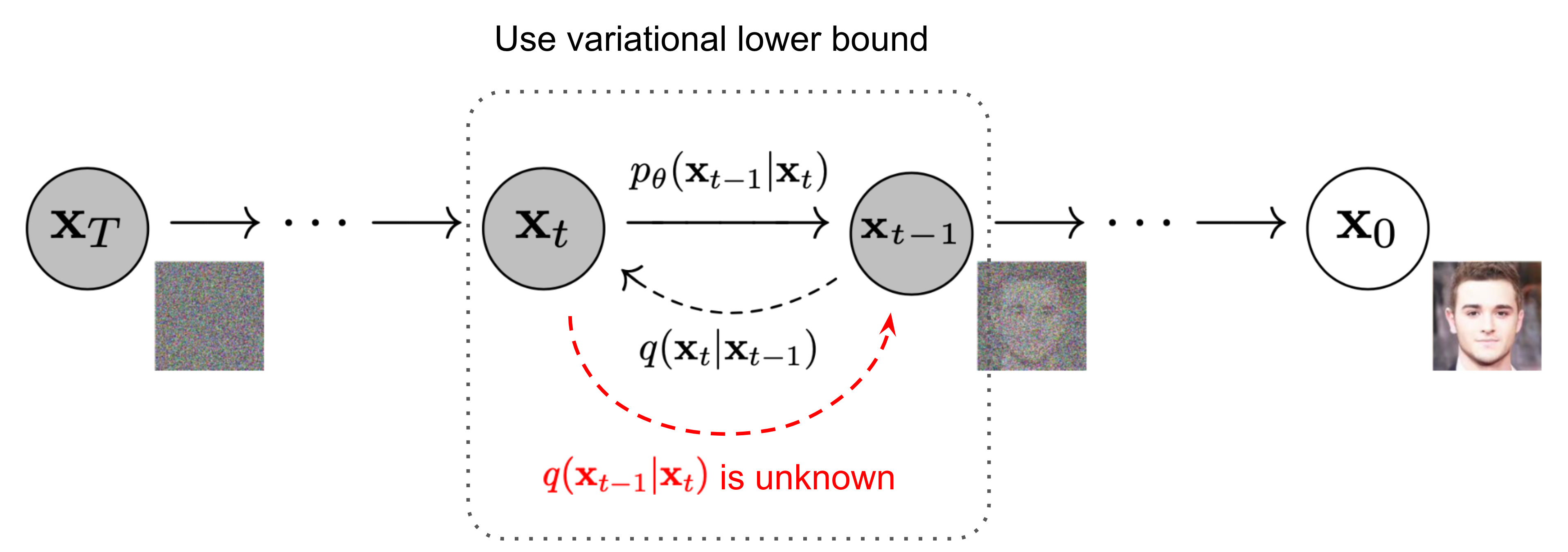
反向扩散过程
如果能将上述过程反向,就能从高斯噪声图像得到一整图像了.也就是需要知道$q(\mathbf{x}{t-1}|\mathbf{x}{t})$,这跟贝叶斯有点关系,可以使用神经网络近似这个条件概率,以便运行反向扩散过程.
假设反向也是高斯,可以有条件概率
使用贝叶斯
根据一堆公式计算(这不是我擅长的),得到均值和方差.
由于$\mathbf{x}_0=\frac1{\sqrt{\bar{\alpha}_t}}(\mathbf{x}_t-\sqrt{1-\bar{\alpha}_t}\boldsymbol{\epsilon}_t)$,有均值如下:
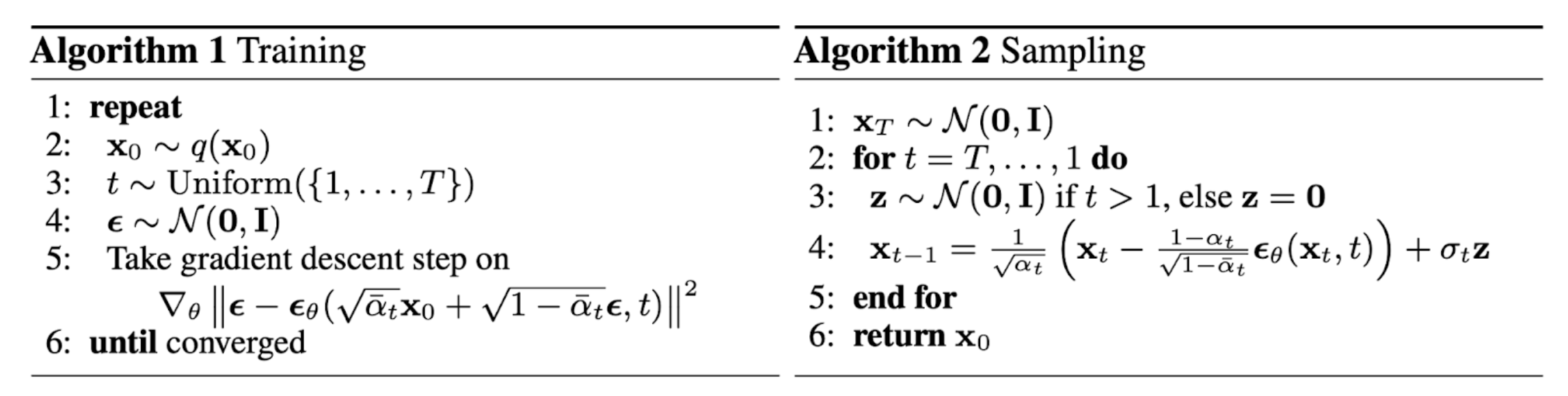
所以需要训练一个神经网络拟合这个概率分布,使用重参数化技巧,前向加噪声后,利用得到的图像数据得到高斯分布的参数μ
简化
最终目标优化函数
加速扩散模型采样
DDPM生成样本很慢,可以通过经过多步后进行采样(也就是增加采样间隔),或者根据DDIM论文,跳过p(x~t~|x~t-1~)直接从p(x~t~|x~0~)出发.
参考资料
- The Annotated Diffusion Model (huggingface.co)
- diffusion_model.ipynb - Colaboratory (google.com)
- cloneofsimo/minDiffusion: Self-contained, minimalistic implementation of diffusion models with Pytorch. (github.com)
- What are Diffusion Models? | Lil’Log (lilianweng.github.io)
- 生成扩散模型漫谈(一):DDPM = 拆楼 + 建楼 - 科学空间|Scientific Spaces
- Diffusion Models from Scratch in PyTorch (sungsoo.github.io)
